Welcome to som-pbc’s documentation!
som-pbc

Authors: Alex Müller
Copyright: (c) 2017 - 2022; Alex Müller
This package contains a simple self-organizing map implementation in Python with periodic boundary conditions.
Self-organizing maps are also called Kohonen maps and were invented by Teuvo Kohonen.[1] They are an unsupervised machine learning technique to efficiently create spatially organized internal representations of various types of data. For example, SOMs are well-suited for the visualization of high-dimensional data.
This is a simple implementation of SOMs in Python. This SOM has periodic
boundary conditions and therefore can be imagined as a “donut”. The
implementation uses numpy, scipy, scikit-learn and
matplotlib.
The project’s GitHub page can be found here: http://github.com/alexarnimueller/som
som-pbc README
A simple self-organizing map implementation in Python with periodic boundary conditions.
Self-organizing maps are also called Kohonen maps and were invented by Teuvo Kohonen.[1] They are an unsupervised machine learning technique to efficiently create spatially organized internal representations of various types of data. For example, SOMs are well-suited for the visualization of high-dimensional data.
This is a simple implementation of SOMs in Python. This SOM has periodic
boundary conditions and therefore can be imagined as a “donut”. The
implementation uses numpy, scipy, scikit-learn and
matplotlib.
Installation
som-pbc can be installed from pypi using pip:
pip install som-pbc
To upgrade som-pbc to the latest version, run:
pip install --upgrade som-pbc
Usage
Then you can import and use the SOM class as follows:
import numpy as np
from som import SOM
# generate some random data with 36 features
data1 = np.random.normal(loc=-.25, scale=0.5, size=(500, 36))
data2 = np.random.normal(loc=.25, scale=0.5, size=(500, 36))
data = np.vstack((data1, data2))
som = SOM(10, 10) # initialize a 10 by 10 SOM
som.fit(data, 10000, save_e=True, interval=100) # fit the SOM for 10000 epochs, save the error every 100 steps
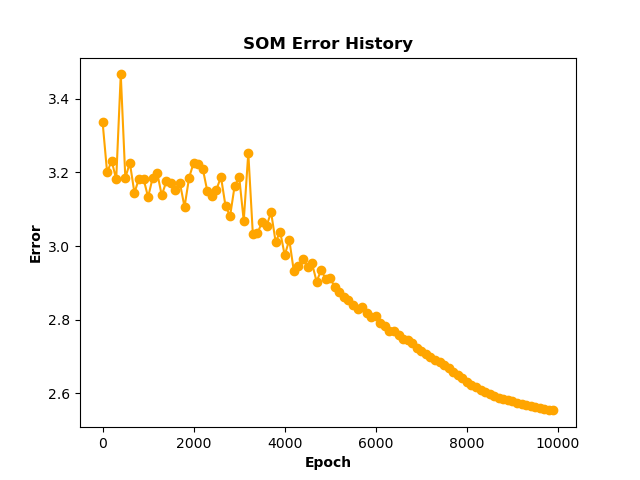
som.plot_error_history(filename='images/som_error.png') # plot the training error history
targets = np.array(500 * [0] + 500 * [1]) # create some dummy target values
# now visualize the learned representation with the class labels
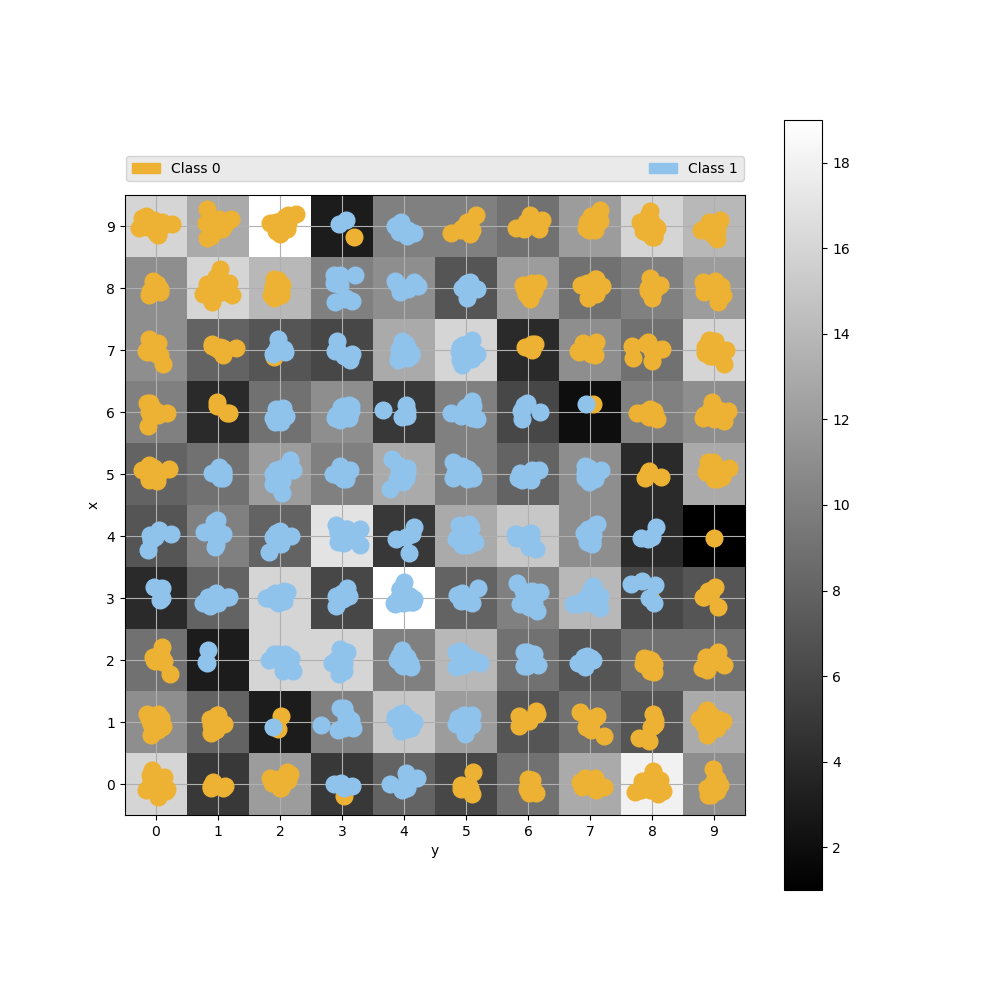
som.plot_point_map(data, targets, ['Class 0', 'Class 1'], filename='images/som.png')
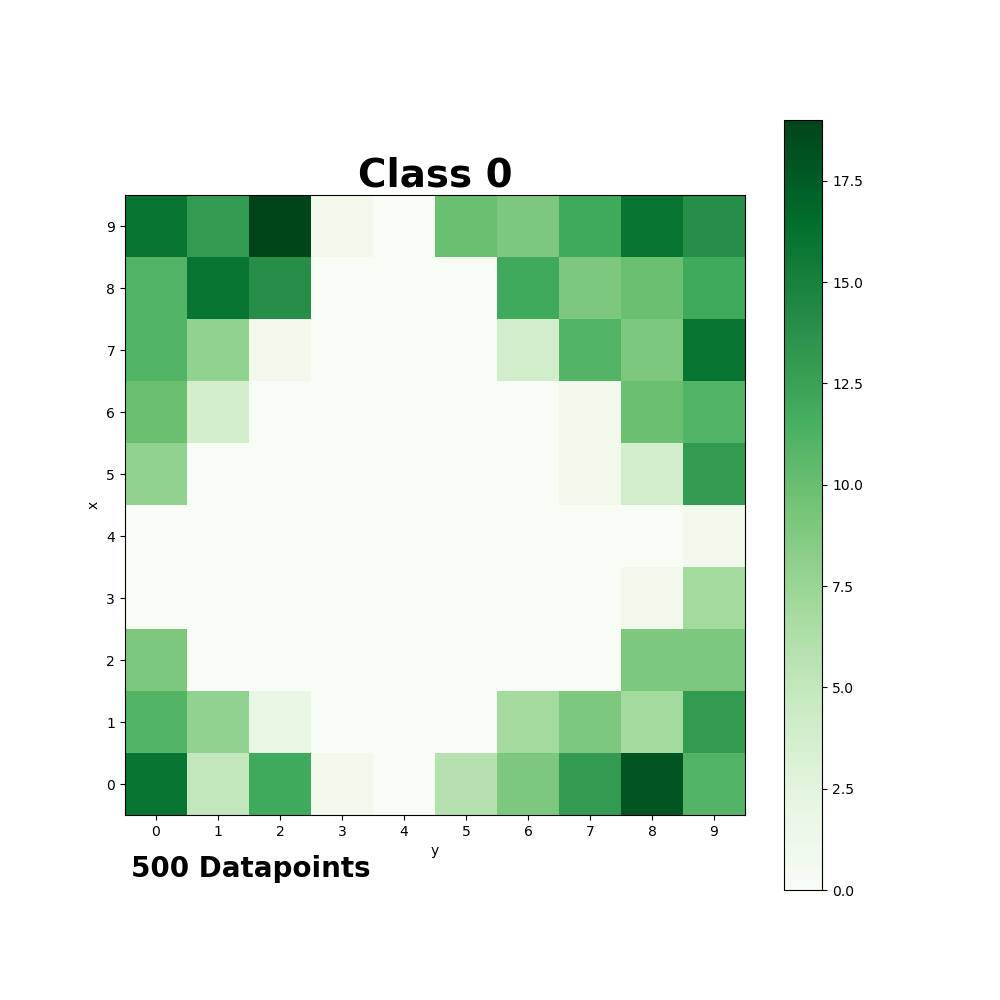
som.plot_class_density(data, targets, t=0, name='Class 0', colormap='Greens', filename='images/class_0.png')
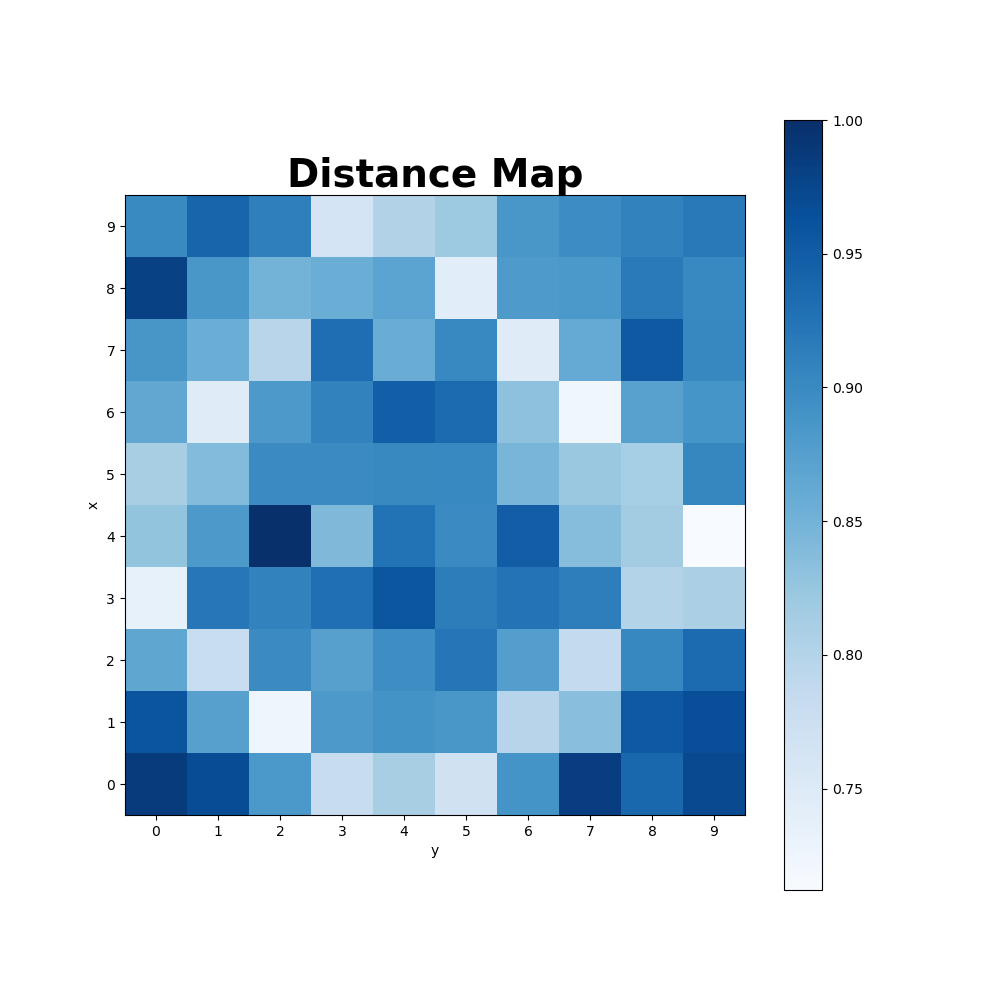
som.plot_distance_map(colormap='Blues', filename='images/distance_map.png') # plot the distance map after training
# predicting the class of a new, unknown datapoint
datapoint = np.random.normal(loc=.25, scale=0.5, size=(1, 36))
print("Labels of neighboring datapoints: ", som.get_neighbors(datapoint, data, targets, d=0))
# transform data into the SOM space
newdata = np.random.normal(loc=.25, scale=0.5, size=(10, 36))
transformed = som.transform(newdata)
print("Old shape of the data:", newdata.shape)
print("New shape of the data:", transformed.shape)
Training Error:
Point Map:
Class Density:
Distance Map:
The same way you can handle your own data.
Methods / Functions
The SOM class has the following methods:
initialize(data, how='pca'): initialize the SOM, either via Eigenvalues (pca) or randomly (random)winner(vector): compute the winner neuron closest to a given data point invector(Euclidean distance)cycle(vector): perform one iteration in adapting the SOM towards the chosen data point invectorfit(data, epochs=0, save_e=False, interval=1000, decay='hill'): train the SOM on the givendatafor severalepochstransform(data): transform givendatain to the SOM spacedistance_map(metric='euclidean'): get a map of every neuron and its distances to all neighbors based on the neuron weightswinner_map(data): get the number of times, a certain neuron in the trained SOM is winner for the givendatawinner_neurons(data): for every data point, get the winner neuron coordinatessom_error(data): calculates the overall error as the average difference between the winning neurons and thedataget_neighbors(datapoint, data, labels, d=0): get the labels of alldataexamples that aredneurons away fromdatapointon the mapsave(filename): save the whole SOM instance into a pickle fileload(filename): load a SOM instance from a pickle fileplot_point_map(data, targets, targetnames, filename=None, colors=None, markers=None, density=True): visualize the som with all data as points around the neuronsplot_density_map(data, filename=None, internal=False): visualize the data density in different areas of the SOM.plot_class_density(data, targets, t, name, colormap='Oranges', filename=None): plot a density map only for the given classplot_distance_map(colormap='Oranges', filename=None): visualize the disance of the neurons in the trained SOMplot_error_history(color='orange', filename=None): visualize the training error history after training (fit withsave_e=True)
References:
[1] Kohonen, T. Self-Organized Formation of Topologically Correct Feature Maps. Biol. Cybern. 1982, 43 (1), 59–69.
This work was partially inspired by ramalina’s som implementation and JustGlowing’s minisom.
Documentation:
Documentation for som-pbc is hosted on readthedocs.io.
Documentation for the som module
- class som.SOM(x: int, y: int, alpha_start: float = 0.6, sigma_start: Optional[float] = None, seed: Optional[int] = None)
Class implementing a self-organizing map with periodic boundary conditions. It has the following methods:
- cycle(vector: ndarray, verbose: bool = True)
Perform one iteration in adapting the SOM towards a chosen data point
- Parameters
vector (np.ndarray) – current data point
verbose (bool) – verbosity control
- distance_map(metric: str = 'euclidean')
Get the distance map of the neuron weights. Every cell is the normalised average of all distances between the neuron and all other neurons.
- Parameters
metric (str) – distance metric to be used (see
scipy.spatial.distance.cdist)- Returns
normalized sum of distances for every neuron to its neighbors, stored in
SOM.distmap
- fit(data: ndarray, epochs: int = 0, save_e: bool = False, interval: int = 1000, decay: str = 'hill', verbose: bool = True)
Train the SOM on the given data for several iterations
- Parameters
data (np.ndarray) – data to train on
epochs (int, optional) – number of iterations to train; if 0, epochs=len(data) and every data point is used once
save_e (bool, optional) – whether to save the error history
interval (int, optional) – interval of epochs to use for saving training errors
decay (str, optional) – type of decay for alpha and sigma. Choose from ‘hill’ (Hill function) and ‘linear’, with ‘hill’ having the form
y = 1 / (1 + (x / 0.5) **4)verbose (bool) – verbosity control
- get_neighbors(datapoint: ndarray, data: ndarray, labels: ndarray, d: int = 0) ndarray
return the labels of the neighboring data instances at distance d for a given data point of interest
- Parameters
datapoint (np.ndarray) – descriptor vector of the data point of interest to check for neighbors
data (np.ndarray) – reference data to compare datapoint to
labels (np.ndarray) – array of labels describing the target classes for every data point in data
d (int) – length of Manhattan distance to explore the neighborhood (0: same neuron as data point)
- Returns
found neighbors (labels)
- Return type
np.ndarray
- initialize(data: ndarray, how: str = 'pca')
Initialize the SOM neurons
- Parameters
data (numpy.ndarray) – data to use for initialization
how (str) – how to initialize the map, available: pca (via 4 first eigenvalues) or random (via random values normally distributed in the shape of data)
- Returns
initialized map in
SOM.map
- load(filename: str)
Load a SOM instance from a pickle file.
- Parameters
filename (str) – filename (best to end with .p)
- Returns
updated instance with data from filename
- plot_class_density(data: ndarray, targets: Union[list, ndarray], t: int = 1, name: str = 'actives', colormap: str = 'gray', example_dict: Optional[dict] = None, filename: Optional[str] = None)
Plot a density map only for the given class
- Parameters
data (np.ndarray) – data to visualize the SOM density (number of times a neuron was winner)
targets (list, np.ndarray) – array of target classes (0 to len(targetnames)) corresponding to data
t (int) – target class to plot the density map for
name (str) – target name corresponding to target given in t
colormap (str) – colormap to use, select from matplolib sequential colormaps
example_dict (dict) – dictionary containing names of examples as keys and corresponding descriptor values as values. These examples will be mapped onto the density map and marked
filename (str) – optional, if given, the plot is saved to this location
- Returns
plot shown or saved if a filename is given
- plot_density_map(data: ndarray, colormap: str = 'gray', filename: Optional[str] = None, example_dict: Optional[dict] = None, internal: bool = False)
Visualize the data density in different areas of the SOM.
- Parameters
data (np.ndarray) – data to visualize the SOM density (number of times a neuron was winner)
colormap (str) – colormap to use, select from matplolib sequential colormaps
filename (str) – optional, if given, the plot is saved to this location
example_dict (dict) – dictionary containing names of examples as keys and corresponding descriptor values as values. These examples will be mapped onto the density map and marked
internal (bool) – if True, the current plot will stay open to be used for other plot functions
- Returns
plot shown or saved if a filename is given
- plot_distance_map(colormap: str = 'gray', filename: Optional[str] = None)
Plot the distance map after training.
- Parameters
colormap (str) – colormap to use, select from matplolib sequential colormaps
filename (str) – optional, if given, the plot is saved to this location
- Returns
plot shown or saved if a filename is given
- plot_error_history(color: str = 'orange', filename: Optional[str] = None)
plot the training reconstruction error history that was recorded during the fit
- Parameters
color (str) – color of the line
filename (str) – optional, if given, the plot is saved to this location
- Returns
plot shown or saved if a filename is given
- plot_point_map(data: ndarray, targets: Union[list, ndarray], targetnames: Union[list, ndarray], filename: Optional[str] = None, colors: Optional[Union[list, ndarray]] = None, markers: Optional[Union[list, ndarray]] = None, colormap: str = 'gray', example_dict: Optional[dict] = None, density: bool = True, activities: Optional[Union[list, ndarray]] = None)
Visualize the som with all data as points around the neurons
- Parameters
data (np.ndarray) – data to visualize with the SOM
targets (list, np.ndarray) – array of target classes (0 to len(targetnames)) corresponding to data
targetnames (list, np.ndarray) – names describing the target classes given in targets
filename (str, optional) – if provided, the plot is saved to this location
colors (list, np.ndarray, None; optional) – if provided, different classes are colored in these colors
markers (list, np.ndarray, None; optional) – if provided, different classes are visualized with these markers
colormap (str) – colormap to use, select from matplolib sequential colormaps
example_dict (dict) – dictionary containing names of examples as keys and corresponding descriptor values as values. These examples will be mapped onto the density map and marked
density (bool) – whether to plot the density map with winner neuron counts in the background
activities (list, np.ndarray, None; optional) – list of activities (e.g. IC50 values) to use for coloring the points accordingly; high values will appear in blue, low values in green
- Returns
plot shown or saved if a filename is given
- save(filename: str)
Save the SOM instance to a pickle file.
- Parameters
filename (str) – filename (best to end with .p)
- Returns
saved instance in file with name filename
- som_error(data: ndarray) float
Calculates the overall error as the average difference between the winning neurons and the data points
- Parameters
data (np.ndarray) – data to calculate the overall error for
- Returns
normalized error
- Return type
float
- transform(data: ndarray) ndarray
Transform data in to the SOM space
- Parameters
data (np.ndarray) – data to be transformed
- Returns
transformed data in the SOM space
- Return type
np.ndarray
- winner(vector: ndarray) ndarray
Compute the winner neuron closest to the vector (Euclidean distance)
- Parameters
vector (np.ndarray) – vector of current data point(s)
- Returns
indices of winning neuron
- Return type
np.ndarray
- winner_map(data: ndarray) ndarray
Get the number of times, a certain neuron in the trained SOM is the winner for the given data.
- Parameters
data (np.ndarray) – data to compute the winner neurons on
- Returns
map with winner counts at corresponding neuron location
- Return type
np.ndarray
- winner_neurons(data: ndarray) ndarray
For every datapoint, get the winner neuron coordinates.
- Parameters
data (np.ndarray) – data to compute the winner neurons on
- Returns
winner neuron coordinates for every datapoint
- Return type
np.ndarray
- som.man_dist_pbc(m: ndarray, vector: ndarray, shape: tuple = (10, 10)) ndarray
Manhattan distance calculation of coordinates with periodic boundary condition
- Parameters
m (np.ndarray) – array / matrix (reference)
vector (np.ndarray) – array / vector (target)
shape (tuple, optional) – shape of the full SOM
- Returns
Manhattan distance for v to m
- Return type
np.ndarray
Example Scripts
Using som-pbc to map to random distributions:
import numpy as np
from som import SOM
# generate some random data with 36 features
data1 = np.random.normal(loc=-.25, scale=0.5, size=(500, 36))
data2 = np.random.normal(loc=.25, scale=0.5, size=(500, 36))
data = np.vstack((data1, data2))
som = SOM(10, 10) # initialize the SOM
som.fit(data, 10000, save_e=True, interval=100) # fit the SOM for 10000 epochs, save the error every 100 steps
som.plot_error_history(filename='../images/som_error.png') # plot the training error history
targets = np.array(500 * [0] + 500 * [1]) # create some dummy target values
# now visualize the learned representation with the class labels
som.plot_point_map(data, targets, ['Class 0', 'Class 1'], filename='../images/som.png')
som.plot_class_density(data, targets, t=0, name='Class 0', filename='../images/class_0.png')
som.plot_distance_map(filename='../images/distance_map.png') # plot the distance map after training
Advanced script to train, save and load soms:
#! /usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Alex Müller 2021-05-18 Created
"""
import logging
import os
import sys
import time
from argparse import ArgumentParser
import numpy as np
import pandas as pd
from som import SOM
logger = logging.getLogger(__name__)
__version__ = '1.0'
__author__ = 'Alex Müller'
def main(in_file, out_file, x, y, epochs, ref=None, test=False, verbose=0):
if test:
df = pd.DataFrame(in_file, columns=range(in_file.shape[1]))
else:
df = pd.read_table(in_file, sep='\t', low_memory=True, index_col=0)
s = df.shape[0]
df.dropna(axis=0, how='any', inplace=True)
sn = df.shape[0]
if s != sn:
logger.warning('%d rows dropped due to missing values' % (s - sn))
s = df.shape[1]
df = df.select_dtypes(include=[np.number])
sn = df.shape[1]
if s != sn:
logger.warning('%d columns dropped due to non-numeric data type' % (s - sn))
basedir = os.path.dirname(os.path.abspath(__file__))
som = SOM(x, y)
if ref == 'IRCI':
som = som.load('/SOM.pkl')
embedding = som.winner_neurons(df.values)
else:
som.fit(df.values, epochs, verbose=verbose)
embedding = som.winner_neurons(df.values)
if ref == 'Create':
som.save(basedir + '/SOM.pkl')
emb_df = pd.DataFrame({'ID': df.index})
emb_df['X'] = embedding[:, 1]
emb_df['Y'] = embedding[:, 0]
if test:
return emb_df
else:
emb_df.to_csv(out_file, index=False, sep='\t')
if __name__ == "__main__":
description = "Self-Organizing Map\n\n"
description += "%s [options] -i infile -o outfile\n\n" % os.path.split(__file__)[1]
description += "%s: version %s - created by %s\n" % (os.path.split(__file__)[1], __version__, __author__)
parser = ArgumentParser(description=description)
parser.add_argument('-i', '--infile', dest='file_in', metavar='FILE',
help='Specify the input file (TAB format with ID in column 1)', action='store', default="-")
parser.add_argument('-o', '--outfile', dest='file_out', metavar='FILE',
help='Specify the output file (default is STDOUT).', action='store', default="-")
parser.add_argument('-x', '--x', dest='x', action='store', type=int, default=10,
help='Size of the SOM in x-coordinate')
parser.add_argument('-y', '--y', dest='y', action='store', type=int, default=10,
help='Size of the SOM in y-coordinate')
parser.add_argument('-e', '--epochs', dest='epochs', action='store', type=int, default=1000,
help='Number of epochs to train.')
parser.add_argument('-r', '--ref', dest='ref', choices=['Create', 'IRCI', 'None'], default='None',
help='Use or create a reference PCA / UMAP model. If `None`, a new one is trained (not saved).')
parser.add_argument('-v', '--verbose', dest='verbose', const=1, default=0, type=int, nargs="?",
help="increase verbosity: 0=warnings, 1=info, 2=debug. No number means info. Default is 0.")
parser.add_argument('-s', '--test', dest='test', type=bool, default=False, action='store', help='Use for testing.')
args = parser.parse_args()
if args.test:
import matplotlib.pyplot as plt
from sklearn.datasets import make_blobs
X = make_blobs(n_features=512, cluster_std=3.)
T = main(X[0], None, args.x, args.y, args.epochs, ref=args.ref, test=True)
plt.scatter(T['X'], T['Y'], c=X[1])
plt.title('SOM test plot')
plt.savefig('SOM_test.png')
else:
infile = sys.stdin if args.file_in == '-' else args.file_in
outfile = sys.stdout if args.file_out == '-' else args.file_out
# Start Time Monitoring
timestart = time.time()
# Initialisation...
level = logging.WARNING
if args.verbose == 1:
level = logging.INFO
elif args.verbose == 2:
level = logging.DEBUG
logging.basicConfig(level=level, format="%(asctime)s %(module)s %(levelname)-7s %(message)s",
datefmt="%Y/%b/%d %H:%M:%S")
try:
main(infile, outfile, args.x, args.y, args.epochs, args.ref)
except Exception as err:
logger.warning('Error occurred: %s' % str(err))
if args.verbose:
timetotal = time.time() - timestart
logger.info("%s completed!" % os.path.split(__file__)[1])
logger.info('Total wall time in seconds was: %f' % timetotal)
# Close properly
logging.shutdown()
sys.stdin.close()
sys.stdout.close()
LICENSE
MIT License
Copyright (c) 2018 Alex Müller
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the “Software”), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.